|
|
||
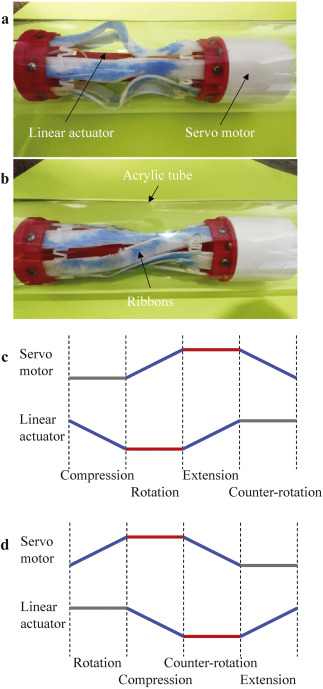
Fig. 2. Multistable buckling mechanics and actuation sequences. (a) Linear actuator contracts: The ribbons are compressed and buckled outward in the radial direction until contacting the inner surface of the tube. (b) Servo motor rotates: The ribbons are twisted. (c) Actuation sequence for 2DOF crawling forward. (d) Actuation sequence for 2DOF crawling backward. The blue lines represent the actuation of the linear actuator or the servo motor, the red lines represent their pause, and the gray lines represent that linear actuator or servo motor is in original state .
FROM:
Chao-Yung Yeh, Shih-Chien Chou, Hsin-Wei Huang, Hung-Chen Yu and Jia-Yang Juang (Department of Mechanical Engineering National Taiwan University, Taipei 10617, Taiwan),
“Tube-crawling soft robots driven by multistable buckling mechanics”, Extreme Mechanics Letters, Vol. 26, pp 61-68, January 2019, https://doi.org/10.1016/j.eml.2018.12.004
ABSTRACT: We present a class of soft robots, which can self-adaptively move forward and backward along a tube with an arbitrary cross-section. The soft robot consists of a linear actuator, a motor, and a set of connected soft elastic ribbons, arranged longitudinally on the robot’s circumference. These ribbons, with strategically designed creases and linkages, can be bended and twisted into different three-dimensional configurations via nonlinear mechanical buckling, thereby achieving forward and backward motions by simply using different actuation sequences of the two actuators. Our approach, based on multistable buckling mechanics and loading-sequence strategy, is thus fundamentally different from existing platforms such as “inchworm” and “earthworm” peristaltic robots, which require at least three actuators and not utilize multiple distinct buckling modes for locomotion. Our design may shed light on the development of new locomotions, and may serve as an alternative for designing soft robots for pipe inspection, repairing, and other applications.
Page 286 / 410