|
|
||
This and the next 2 images are from:
Sicong Liu (2), Weilin Lv (1,3), Yan Chen (1,3) and Guoxing Lu (4)
(1) Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, Tianjin University, Tianjin 300072, China
(2) School of Mechanical and Aerospace Engineering, Nanyang Technological University, 50 Nanyang Avenue, Singapore 639798
(3) School of Mechanical Engineering, Tianjin University, Tianjin 300072, China
(4) Faculty of Science, Engineering and Technology, Swinburne University of Technology, Hawthorn Vic 3122, Australia
“Deployable prismatic structures with rigid origami patterns”, ASME Journal of Mechanisms and Robotics, 2015, doi:10.1115/1.4031953
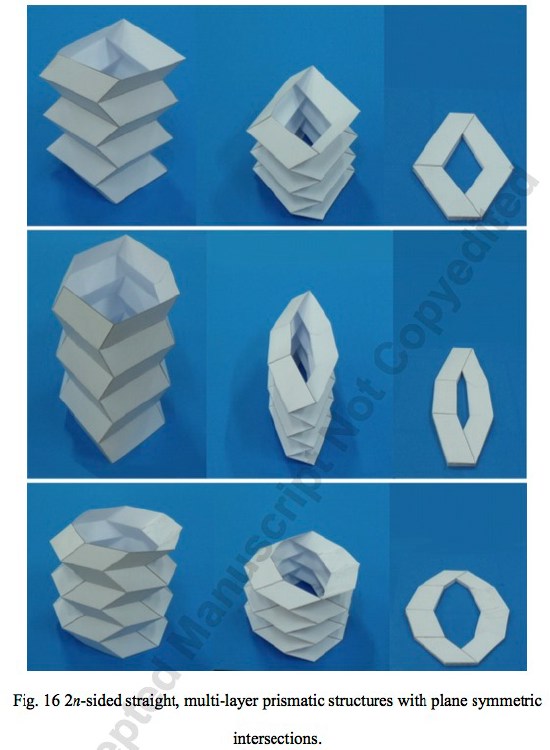
ABSTRACT: Rigid origami inspires new design technology in deployable structures with large deployable ratio due to the property of flat foldability. In this paper we present a general kinematic model of rigid origami pattern and obtain a family of deployable prismatic structures. Basically, a 4-crease vertex rigid origami pattern can be presented as a spherical 4R linkage, and the multi-vertex patterns are the assemblies of spherical linkages. Thus, this prismatic origami structure is modelled as a closed loop of spherical 4R linkages, which includes all the possible prismatic deployable structures consisting of quadrilateral facets and 4-crease vertices. By solving the compatibility of the kinematic model, a new group of 2n-sided deployable prismatic structures with plane symmetric intersections is derived with multilayer, straight and curvy variations. The general design method for the 2n-sided multilayer deployable prismatic structures is proposed. All the deployable structures constructed with this method have one single degree of freedom, can be deployed and folded without stretching or twisting the facets, and have the compactly flat-folded configuration, which makes it have great potential in engineering applications.
Page 293 / 410