|
|
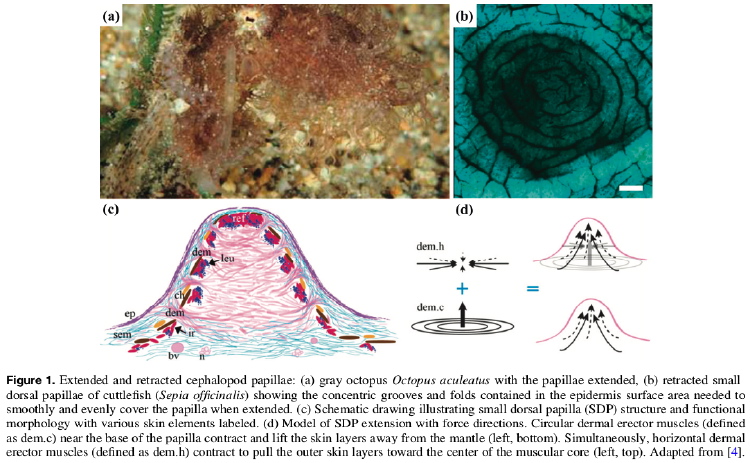
||
References [4], [4b] and [4c] are:
[4] Kreit E, Mäthger L M, Hanlon R T, Dennis P B, Naik R R, Forsythe E and Heikenfeld J 2013 J. R. Soc. Interface 10 20120601
[4b] Allen J J, Bell G R, Kuzirian A M and Hanlon R T 2013 J. Morphol. 274 645
[4c] Allen J J, Mäthger L M, Barbosa A and Hanlon R T 2009 J. Comp. Physiol. A 195 547–55
This and the next image are from:
Stephen Daynes (1), Richard S Trask (2) and Paul M Weaver (2)
(1) School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University Building 251.3.57, Bundoora Campus East Bundoora, Victoria 3083, Australia
(2) Advanced Composites Centre for Innovation and Science, University of Bristol, Queen's Building, Bristol, BS81TR, UK
“Bio-inspired structural bistability employing elastomeric origami for morphing applications”, Smart Mater. Struct. Vol. 23, No. 12, 125011, 2014
ABSTRACT: A structural concept based upon the principles of adaptive morphing cells is presented whereby controlled bistability from a flat configuration into a textured arrangement is shown. The material consists of multiple cells made from silicone rubber with locally reinforced regions based upon kirigami principles. On pneumatic actuation these cells fold or unfold based on the fold lines created by the interaction of the geometry with the reinforced regions. Each cell is able to maintain its shape in either a retracted or deployed state, without the aid of mechanisms or sustained actuation, due to the existence of structural bistability. Mathematical quantification of the surface texture is introduced, based on out-of-plane deviations of a deployed structure compared to a reference plane. Additionally, finite element analysis is employed to characterize the geometry and stability of an individual cell during actuation and retraction. This investigation highlights the critical role that angular rotation, at the center of each cell, plays on the deployment angle as it transitions through the elastically deployed configuration. The analysis of this novel concept is presented and a pneumatically actuated proof-of-concept demonstrator is fabricated.
Page 377 / 410