|
|
||
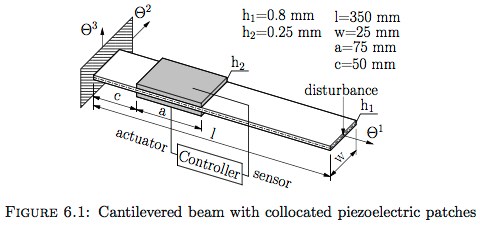
A cantilevered beam with collocated piezoelectric patches bonded on both surfaces at a distance of 50 mm from the cantilevered end (two-PZT-patch beam), as shown in Figure 6.1, is used for the validation test of the PID, LQR, LQG and DR control. The upper piezoelectric patch acts as a sensor and the lower one as an actuator. The patches have opposite polarizations in the direction of the outward normal vectors of the upper and lower surfaces, respectively. A concentrated force disturbance will be applied at the tip point of the free end. The dimensions of the master structure are 350 × 25 × 0.8 mm, and those of the piezoelectric patches are 75 × 25 × 0.25 mm.
This and the next image are from:
Shunqi Zhang, “Nonlinear FE Simulation and Active Vibration Control of Piezoelectric Laminated Thin-Walled Smart Structures”, Ph.D. dissertation, Dept. of Machine Knowledge, Technical University of Aachen, 2014
ABSTRACT: This dissertation deals with nonlinear finite element modeling and active vibration control for piezoelectric integrated smart structures, and is presented in two parts. In the first part, an electro-mechanically coupled large rotation finite element model is developed for static and dynamic analysis of thin-walled structures with piezoelectric sensor and actuator layers. The present large rotation theory is based on the first-order shear deformation hypothesis, which has six independent kinematic parameters but expressed by five nodal degrees of freedom. Unrestricted finite rotations are described by two rotations using the Euler angle representation method. Due to the assumption of small strains and weak electric potential, linear piezoelectric coupled constitutive equations and a linearly distributed electric potential through the thickness are considered. In order to show the necessity of the large rotation theory in the application of thin-walled composite or smart structures undergoing large rotations, several simplified nonlinear shell theories are implemented into finite elements for thin-walled structures as well. The second part develops a disturbance rejection control with a Proportional-Integral (PI) observer which uses step functions to construct a fictitious model of disturbances for active vibration control of smart structures. To improve the dynamic behavior of the existing PI observer, a Generalized PI (GPI) observer is proposed and developed. Therefore, any unknown disturbances can be estimated and compensated by the present disturbance rejection control with either a PI or GPI observer. Additionally, PID, LQR and LQG control strategies are implemented to show the advantages of the proposed disturbance rejection control.
Page 270 / 410