|
|
||
This and the next image are from:
Alexander K. Belyaev (1), Vladimir A. Polyanskiy (2), Nina A. Smirnova (2) and Aleksandr V. Fedotov (1)
(1) Institute for Problems of Mechanical Engineering RAS, 61 Bolshoi Ave. V.O., St. Petersburg 199178, Russian Federation
(2) Peter the Great St. Petersburg Polytechnic University, 29 Politekhnicheskaya St., St. Petersburg 195251, Russian Federation
“Identification procedure in the modal control of a distributed elastic system”, St. Petersburg Polytechnical University Journal: Physics and Mathematics, Vol. 3. pp 135-143, 2017
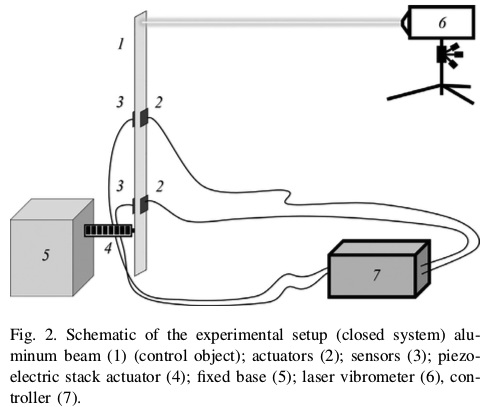
ABSTRACT: It is necessary to provide the separation of the eigenmodes of elastic objects from the sensor signals and to make it possible to independently affect the modes with the use of actuators when realizing the modal system of controlling an elastic object with distributed parameters. The present paper puts forward an identification procedure which allows separating the vibration modes of the object in measured and control signals in the absence of the object model simulation. The control operability of this procedure was verified by experiment through making a system of active suppression of forced bending vibrations of a metal beam. The experiment showed the high control efficiency of the realized modal system.
Page 97 / 114