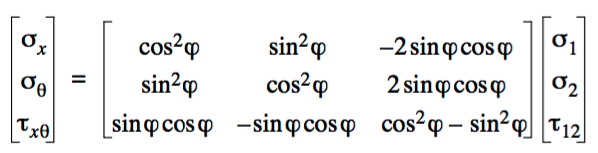
Transformation of stresses from material coordinates (the "1, 2" system) to shell coordinates (the "x,theta" system)
../fullsize/shellstresstransformation.png
../mediafiles/l14.jpg
Transformation of stresses from material coordinates (the "1, 2" system) to shell coordinates (the "x,theta" system)
From the same dissertation as the previous 4 images.
Page 14 / 410