|
|
||
In this particular case the thin-walled structure is an aircraft engine fan blade.
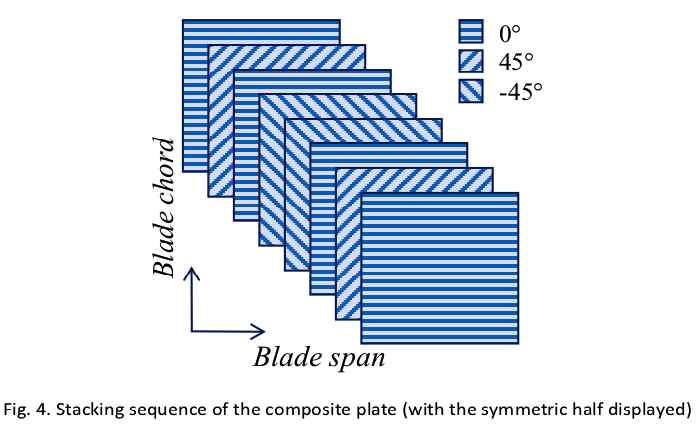
The stacking sequence of the unidirectional lamina is as shown in Fig. 4. A total of 16 layers was used. The 0° direction (longitudinal direction) is along the blade span. Eight layers are shown in this image, with the other eight layers arranged symmetricallly about the middle surrface of the plate or shell.
FROM:
Yadong Zhou (1), Youchao Sun (1) and Tianlin Huang (2)
(1)College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211100, China.
(2) Commercial Aircraft Engine Co., LTD, Aero Engine Cooperation of China, Shanghai 201100, China.
“Impact responses of slender composite plates for bird-strike testing of fan blades”, Latin American Journal of Solids and Structures, Vol. 16, No. 9, e232, 2019, https://doi.org/10.1590/1679-78255809
ABSTRACT: Bird-strike failure of fan blades is one of the basic challenges for the safety of aircraft engines. Simplified slender blade-like plates are always used to evaluate the impact-induced damage mechanism at design stage. One undesirable issue is the failure at the root of clamped slender plates, which cannot recover the real case of twisted blades. For this purpose, three different strategies were exploited to obtain desirable deformation and stress responses, namely the impact location, additional weight, and the boundary condition. Numerical models of the simplified slender blade and the bird projectile were constructed by using finite element method (FEM) and smoothed particle hydrodynamics (SPH) approaches. The impact deformations and stress distributions were comparatively investigated in detail. The numerical results show that changing the boundary condition is the most effective way to obtain preferable impact responses for further failure analysis of real fan blades. Present results will be useful to future experimental design of simplified bird-strike testing.
Page 8 / 410