|
|
||
From:
Y. Li, D. Xu, Y. Yue, Y. Wang, S-F Chang, E. Grinspun, and P. K. Allen (Columbia University), “Regrasping and unfolding of deformable garments using predictive thin shell modeling”, In Proc. ICRA, May 2015.
ABSTRACT: Deformable objects such as garments are highly unstructured, making them difficult to recognize and manipulate. In this paper, we propose a novel method to teach a two-arm robot to efficiently track the states of a garment from an unknown state to a known state by iterative regrasping. The problem is formulated as a constrained weighted evaluation metric for evaluating the two desired grasping points during regrasping, which can also be used for a convergence criterion The result is then adopted as an estimation to initialize a regrasping, which is then considered as a new state for evaluation. The process stops when the predicted thin shell conclusively agrees with reconstruction. We show experimental results for regrasping a number of different garments including sweater, knitwear, pants, and leggings, etc.
Yinxiao Li, 2016, “Recognition and Manipulation of Deformable Objects Using Predictive Thin Shell Modeling”, Ph.D thesis, Columbia University Academic Commons, http://dx.doi.org/10.7916/D8V69JJ2.
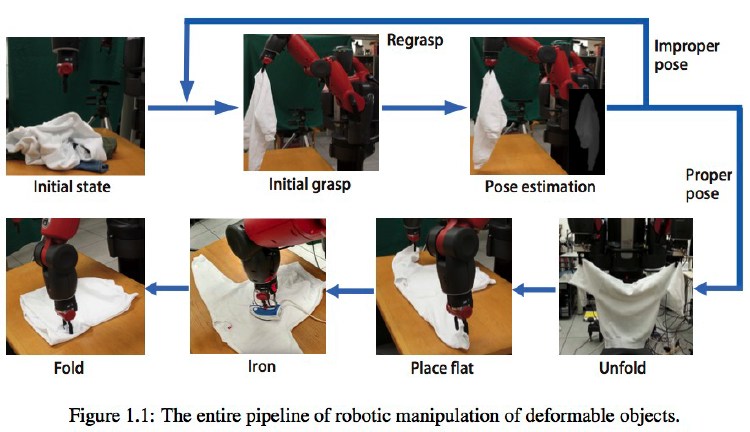
ABSTRACT: This thesis focuses on the task of dexterous manipulation of deformable objects, and in particular, clothing and garments. The task of manipulating deformable objects such as clothing can be broken down into a series of sub-tasks: (1) perceive and pick up garment, and then identify garment and recognize its pose; (2) using a manipulation strategy, regrasp the object to put it into a canonical state; (3) scan the surface of the object to find wrinkles, and use an iron to remove the wrinkles; (4) starting from the wrinkle-free state, fold the garment according to pre-planned sequence of manipulations with optimized trajectories; In this thesis, we will address all the phases of this process. A key contribution of the work is innovative use of simulation. We use offline simulation results to predict states of deformable objects (i.e. cloth, fabric, clothing) that are then recognized by a robotic vision/grasping system to correctly pick up and manipulate these objects. The recognition will use the simulation engine to deform the models in real time to find correct matches. The simulation will also be used to find the optimized trajectories for the manipulation of the garments, such as the garment folding.
Page 189 / 360