|
|
||
This and the next two slides are from the paper:
"On the solution of mode jumping phenomena in thin-walled shell structures" by Eduard Riks, Charles C. Rankin and Francis A. Brogan, Computer Methods in Applied Mechanics and Engineering, Vol. 136, 1996, pp. 59-92.
ABSTRACT: This paper is an investigation into the merits of an hybrid procedure for the numerical simulation of transient buckling problems. The procedure consists of the combination of a classical path-following method with a transient integration method where the first method is used for the quasi static (stable) parts of the simulation and the second method for the parts of the simulation that belong to the transient domain. It is shown that the success of the procedure is guaranteed by a proper formulation of the so-called matching conditions that define the transition from one mode of operation to the other.
The chosen strategy turns out to be very robust and it has as an added advantage that it can be applied with relative ease. The power of the approach is demonstrated with the presentation of two simulations: The mode jumping problem of a plate strip and the collapse of a thin-walled composite cylinder in compression.
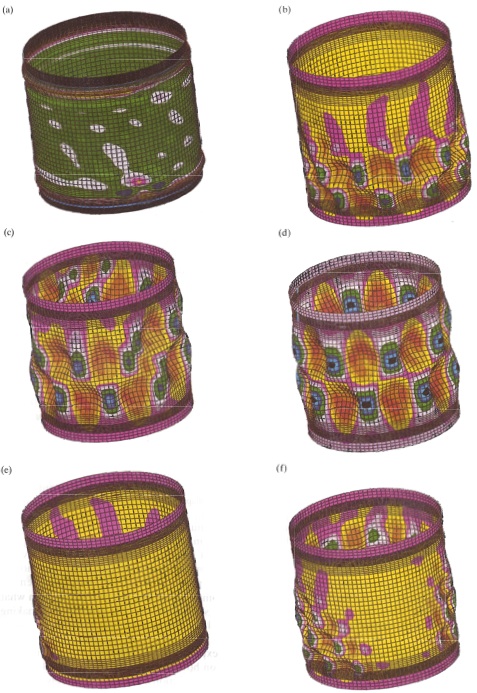
This slide shows the static and dynamic buckling process of a graphite-epoxy composite cylindrical shell under uniform end shortening
This STAGS static and dynamic buckling simulation pertains to a composite cylindrical shell with radius 7.976 inches and wall thickness 0.04 inch. The quasi-isotropic wall has 8 plies with stacking sequence layup angles, [+45, -45, 0, 90, 90, 0, -45, +45]. The cylindrical shell was tested at NASA. Details are given in the report:
C.C. Rankin. E. Riks. J.H. Starnes and W. Allen Waters. Jr., An experimental and numerical verification of the
postbuckling behavior of a composite cylinder in compression, NASA Contractor Report.
The cylindrical shell was geometrically imperfect. The imperfection shape was carefully measured. A Fourier representtion of these measurements consisting of a 24 x 90 term series was used in the STAGS model.
This slide shows snapshots of the buckling motion:
a. Static equilibrium load step number 7 (just before collapse)
b.step 160 (transient phase of the STAGS analysis; see the next slide)
c. step 285 (transient phase of the STAGS analysis)
d. step 384 (stable post-transient state of the shell as predicted by STAGS. This stable post-buckled shape agrees with that observed in the experiment.)
Two intermediate transient states:
e. step 160 again, viewing the cylindrical shell from the opposite side from that viewed in b. This frame demonstrates that the buckles have just begun to propagate into the statically unbuckled region.
f. step 245. The buckles have propagated into the initially statically unbuckled region.
This figure is taken from the paper: "On the solution of mode jumping phenomena in thin-walled shell structures" by Eduard Riks, Charles C. Rankin and Francis A. Brogan, Computer Methods in Applied Mechanics and Engineering, Vol. 136, 1996, pp. 59-92.
Page 48 / 444