|
|
||
FROM:
Zheng Yan, Fan Zhang, Jiechen Wang, Fei Liu, Xuelin Guo, Kewang Nan, Qing Lin, Mingye Gao, Dongqing Xiao, Yan Shi, Yitao Qiu, Haiwen Luan, Jung Hwan Kim, Yiqi Wang, Hongying Luo, Mengdi Han, Yonggang Huang, Yihui Zhang,
and John A. Rogers,
“Controlled Mechanical Buckling for Origami-Inspired Construction of 3D Microstructures in Advanced Materials”, Advanced Functional Materials, 2016, DOI: 10.1002/adfm.201
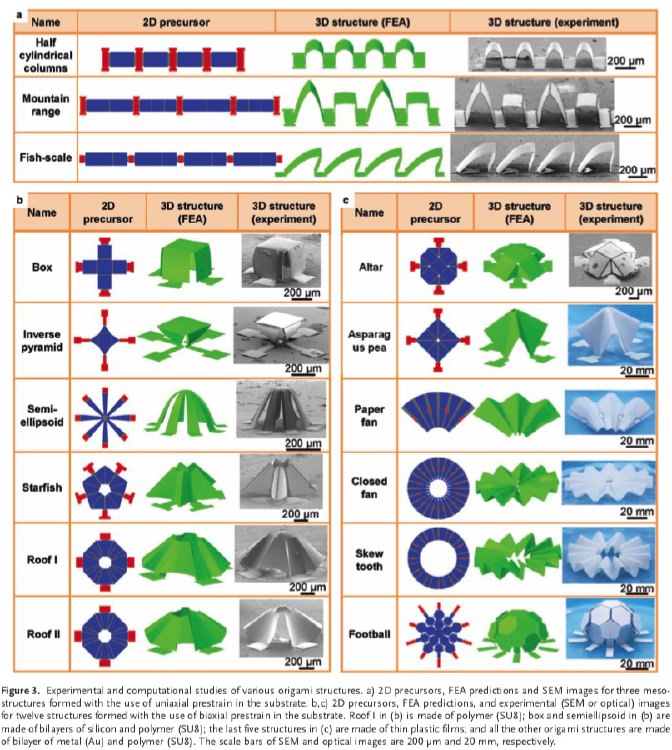
ABSTRACT: Origami is a topic of rapidly growing interest in both the scientific and engineering research communities due to its promising potential in a broad range of applications. Previous assembly approaches for origami structures at the micro/nanoscale are constrained by the applicable classes of materials, topologies, and/or capability for reversible control over the transformation process. Here, a strategy is introduced that exploits mechanical buckling for autonomic origami assembly of 3D structures across material classes from soft polymers to brittle inorganic semiconductors, and length scales from nanometers to centimeters. This approach relies on a spatial variation of thickness in the initial 2D structures as a means to produce engineered folding creases during the compressive buckling process. The elastic nature of the assembly scheme enables active, deterministic control over intermediate states in the 2D to 3D transformation in a continuous and reversible manner. Demonstrations include a broad set of 3D structures formed through unidirectional, bidirectional, and even hierarchical folding, with examples ranging from half cylindrical columns and fish scales, to cubic boxes, pyramids, starfish, paper fans, skew tooth structures, and to amusing system-level examples of soccer balls, model houses, cars, and multifloor textured buildings.
Page 292 / 410