|
|
||
From:
Tomasz Kopecki (Rzeszów University of Technology, Faculty of Mechanical Engineering and Aeronautics, Rzeszów, Poland; e-mail: tkopecki@prz.edu.pl), “Chapter 8: Numerical Reproducing of a Bifurcation in the Stress Distribution Obtaining Process in Post-Critical Deformation States of Aircraft Load-Bearing Structures”, in the book, “Nonlinearity, Bifurcation and Chaos – Theory and Applications”, edited by Jan Awrejcewicz and Peter Hagedorn, ISBN 978-953-51-0816-0, October 21, 2012, DOI: 10.5772/48069
INTRODUCTION: Modern aviation structures are characterised by widespread application of thin-shell load-bearing systems. The strict requirements with regard to the levels of transferred loads and the need to minimise a structure mass often become causes for accepting physical phenomena that in case of other structures are considered as inadmissible. An example of such a phenomenon is the loss of stability of shells that are parts of load-bearing structures, within the range of admissible loads.
Thus, an important stage in design work on an aircraft load-bearing structure is to determine stress distribution in the post-critical deformation state. One of the tools used to achieve this aim is nonlinear finite elements method analysis. The assessment of the reliability of the results thus obtained is based on the solution uniqueness rule, according to which a specific deformation form can correspond to one and only one stress state. In order to apply this rule it is required to obtain numerical model’s displacements distribution fully corresponding to actual deformations of the analysed structure.
An element deciding about a structure’s deformation state is the effect of a rapid change of the structure’s shape occurring when the critical load levels are crossed. From the numerical point of view, this phenomenon is interpreted as a change of the relation between state parameters corresponding to particular degrees of freedom of the system and the control parameter related to the load. This relation, defined as the equilibrium path, in case of an occurrence of mentioned phenomenon, has an alternative character, defined as bifurcation. Therefore, the fact of taking a new deformation form by the structure corresponds to a sudden change to the alternative branch of the equilibrium path [1-4].
Therefore, a prerequisite condition for obtaining a proper form of the numerical model deformation is to retain the conformity between numerical bifurcations and bifurcations in the actual structure. In order to determine such conformity it is required to verify the results obtained by an appropriate model experiment or by using the data obtained during the tests of the actual object. It is often troublesome to obtain reliable results of nonlinear numerical analyses and it requires an appropriate choice of numerical methods dependent upon the type of the analysed structure and precise determination of parameters controlling the course of procedures.
Kopecki's caption for this figure:
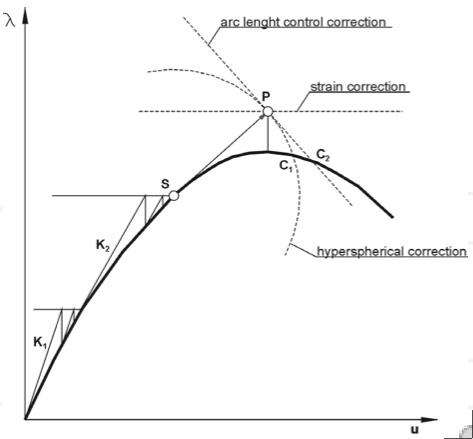
"Figure 1: Graphic presentation of various correction strategies for the representative system of one degree of freedom"
Kopecki writes:
"The prediction-correction methods of determining the consecutive points of the equilibrium path used in modern programs contain also a correction phase based on the satisfaction of an additional equation by the system, called an increment control equation or constraints equation. The graphic interpretation of the increment control equation is presented in Figure 1 (this slide).
"In order to find out whether there is full conformity between the character of actual deformations and their numerical representation it would be required to compare the combinations of the relevant state parameters in all the phases of the course of the phenomenon considered herein. Because of the complication of such a comparative system, the deformation processes are represented in practice by applying substitute characteristics called representative equilibrium paths. They define the relations between a control parameter related to load and a selected, characteristic geometric value related to a structure’s deformation, an increment of which corresponds to a change of the value of all or some state parameters" [Riks' method].
Page 46 / 410