|
 |
 |
 |
 |
 |
|
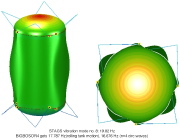
| Example 9, Slide 24: The eighth vibration mode from the STAGS model |
|
| Example 9, Slide 25: Deformed pre-buckled state of the shell meridian at theta=0, axial acceleration |
|
| Example 9, Slide 26: Deformed pre-buckled state of the shell meridian at theta=0, lateral acceleration |
|
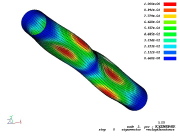
| Example 9, Slide 27: Buckling mode and load factor of the most critical aft strut under Load Case 1 |
|
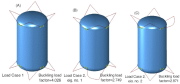
| Example 9, Slide 28: Buckling modes of tank/strut system under Load Case 1 and Load Case 2 predicted by STAGS |
|
|
|
 |
 |
 |
 |
 |
|
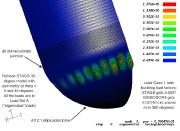
| Example 9, Slide 29: STAGS prediction of the tank buckling mode and load factor for buckling of the aft 2:1 ellipsoidal dome under Load Case 1 |
|
| Example 9, Slide 30: Normalized conductance and empty tank mass versus number of strut pairs at each of two axial locations, long propellant tank |
|
| Example 9, Slide 31: Normalized conductance and empty tank mass versus number of strut pairs at each of two axial locations, short propellant tank |
|
| Example 10, Slide 1: Optimization of propellant tanks supported by one or two optimized laminated composite skirts |
|
| Example 10, Slide 2: Five-segment skirt that supports the propellant tank, as shown in the next slide |
|
|
|
 |
 |
 |
 |
 |
|
| Example 10, Slide 3: Propellant tank external support ring and tapered doubler to which the skirt is attached |
|
| Example 10, Slide 4: Propellant tank with one supporting laminated composite skirt with tapered ends |
|
| Example 10, Slide 5: Detail of the ends of the skirt support, showing the names of some decision variables |
|
| Example 10, Slide 6: "oneskirt" case, Evolution of the objective during the first execution of the GENOPT processor called "SUPEROPT" |
|
| Example 10, Slide 7: "oneskirt case", Evolution of the objective during the second execution of the GENOPT processor called "SUPEROPT" |
|
|

