|
 |
 |
 |
 |
 |
|
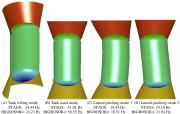
| Example 10, Slide 8: GENOPT/BIGBOSOR4 axisymmetric vibration modes: (A) Tank rolling and (B) tank axial motion |
|
| Example 10, Slide 9: GENOPT/BIGBOSOR4 lateral-pitching vibration modes: (C) Primarily lateral tank motion and (D) primarily tilting tank motion |
|
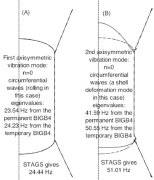
| Example 10, Slide 10: GENOPT/BIGBOSOR4 vibration modes in which shell deformation predominates |
|
| Example 10, Slide 11: Deformed pre-buckled state of the shell meridian at theta=0, (A) axial acceleration, (B) lateral acceleration |
|
| Example 10, Slide 12: Buckling modes and load factors under axial acceleration |
|
|
|
 |
 |
 |
 |
 |
|
| Example 10, Slide 13: Buckling modes and load factors under lateral acceleration |
|
| Example 10, Slide 14: Propellant tank with two supporting laminated composite skirts with tapered ends |
|
| Example 10, Slide 15: "twoskirt" case, Evolution of the objective during the first execution of the GENOPT processor called "SUPEROPT" |
|
| Example 10, Slide 16: GENOPT/BIGBOSOR4 axisymmetric vibration modes: (A) Tank rolling and (B) tank axial motion |
|
| Example 10, Slide 17: GENOPT/BIGBOSOR4 lateral-pitching vibration modes: (C) Primarily lateral tank motion and (D) primarily tilting tank motion |
|
|
|
 |
 |
 |
 |
 |
|
| Example 10, Slide 18: GENOPT/BIGBOSOR4 vibration modes in which shell deformation predominates |
|
| Example 10, Slide 19: Deformed pre-buckled state of the shell meridian and skirts at theta=0, (A) axial acceleration, (B) lateral acceleration |
|
| Example 10, Slide 20 BIGBOSOR4 models of buckling of the optimized “twoskirt” configuration under Load Case 1. |
|
| Example 10, Slide 21: STAGS finite element model of the "twoskirt" case |
|
| Example 10, Slide 22: STAGS vibration modes analogous to the GENOPT/BIGBOSOR4 modes displayed 3 and 4 slides ago |
|
|

